مهندسان دانشگاه کالیفرنیا روش جدیدی را برای ساخت ربات توسعه دادهاند که به تجهیزات خاصی نیاز ندارد و در چند دقیقه به کمک چاپ سهبعدی، رباتهای نرم و انعطافپذیری میسازد.
نوآوری جدید پژوهشگران دانشگاه کالیفرنیا حاصل تفکر مجدد درمورد نحوهی ساخت رباتهای نرم است: پژوهشگران، بهجای کشف اینکه مواد نرم را چگونه بههم بیفزایند تا رباتی محکم ایجاد کنند، با بدنهای نرم آغاز کردند و ویژگی سختی را به اجزای کلیدی آن افزودند. این ساختارها از اسکلت خارجی حشرات الهام گرفته است که دارای قسمتهای نرم و سخت است. پژوهشگران نام ابداع خود را فلکسواسکلتون (flexoskeleton) نهادهاند. روش جدید، امکان ساخت اجزای نرم رباتها را در زمانی بسیار کوتاه و با هزینهای کمتر از قبل مهیا میکند. نیک گراویش، استاد مهندسی مکانیک دانشکدهی مهندسی جاکوبز در سندیگو و نویسندهی ارشد مقاله گفت:
ما امیدواریم که این فلکسواسکلتونها به ایجاد گروه جدیدی از رباتهای نرمالهام گرفته از حیات منجر شود. ما میخواهیم ساخت رباتهای نرم برای پژوهشگران سرتاسر جهان آسانتر شود.
روش جدید، ساخت گروههای بزرگی از رباتهای فلکسواسکلتون را با مونتاژ دستیِ کم امکانپذیر میسازد. همچنین کتابخانهای از اجزای لگومانند مهیا میکند که با استفاده از آن میتوان بهسادگی بخشهایی از ربات را تعویض کرد.
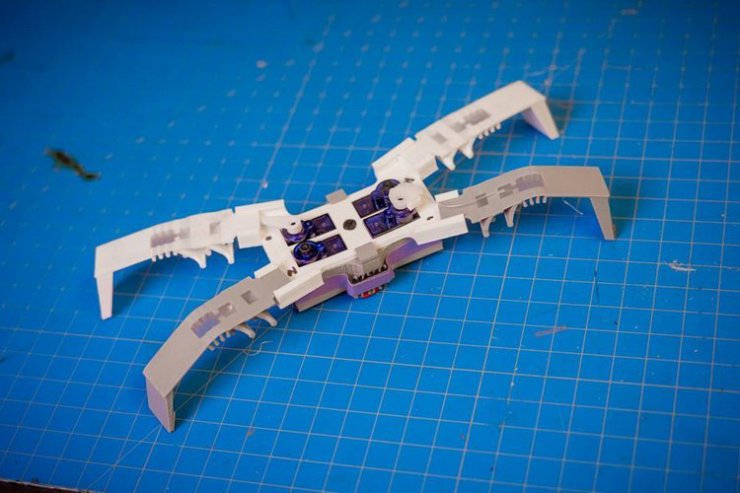
فلکسواسکلتونها از چاپ سهبعدی مادهی سختی روی ورقهی نازکی که بهعنوان یک پایه انعطافپذیر عمل میکند، ساخته میشوند. آنها با ویژگیهای مختلفی چاپ میشوند که در برخی مناطق استحکام بیشتری داشته باشند. این ساختار که از اسکلت خارجی حشرات الهام گرفته است، نرمی و سختی را برای حرکت و پشتیانی با هم تلفیق میکند.
پژوهشگران جزئیات کار خود را در مجلهی Soft Robotics شرح دادهاند. این گروه قصد دارد طرحهای خود را در اختیار پژوهشگران موسسههای دیگر و نیز دبیرستانها قرار دهد.
چاپ یک جزء فلکسواسکلتون ده دقیقه طول میکشد و کمتر از یک دلار هزینه دارد. چاپ فلکسواسکلتون با استفاده از بیشتر چاپگرهای ارزانی که بهطور تجاری در دسترس قرار دارند، امکانپذیر است. چاپ و موتتاژ یک ربات کامل کمتر از دو ساعت طول میکشد. پژوهشگران طیف وسیعی از مواد را مورد بررسی قرار دادند تا اینکه سطح انعطافپذیری مناسبی را پیدا کردند که فلکسواسکلتون را روی آن چاپ کنند (ورقهای از پلیکربنات).
مشاهدهی دقیق رفتار حشرات باعث شد تا آنها برای افزایش استحکام، ویژگیهایی به آن اضافه کنند. هدف نهایی ایجاد خط مونتاژی است که کل رباتهای فلکسواسکلتون را بدون نیاز به مونتاژ دستی، بسازد. گروهی از این رباتهای کوچک میتوانند بهاندازه یا بیشتر از یک ربات بزرگ کار کنند.
در سال ۱۹۸۹، رادنی بروکس همبنیانگذار شرکت iRobot که سپس در آزمایشگاه هوش مصنوعی MIT مشغول کار شد، ماموریتهای فضایی را توصیه کرد که از تعداد زیادی ربات ساده خودکار تشکیل شده باشد. او و همکارش، آنیتا فلین، این عنوان را برای مقالهی خود انتخاب کردند: «سریع، ارزان و خارج از کنترل: تهاجم ربات به منظومهی شمسی». مقالهی مذکور برای گراویش که امیدوار است این مطالعه گامی در این مسیر باشد و البته برای کل حوزهی رباتیک، اندیشهآفرین بود.




پاسخ ها