
علی روحانی؛ برنامه نویس وب
هر چه درباره برنامه نویسی و ماشین و گیمینگ بخونم و برام جالب باشه، اینجام می نویسمشتوسط ۱ نفر دنبال می شود
![این بازوی رباتیک با جداکردن دست خود میتواند به اشیای دورتر برسد [تماشا کنید]](../upload/attach/15143/robotarm3_910x600_0.webp)
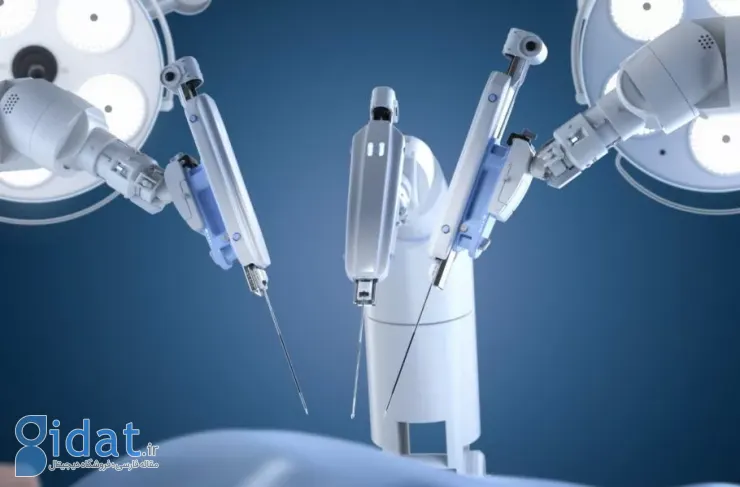
این ربات از یک اتصال مغناطیسی در مچ دست استفاده میکند که به آن اجازه میدهد به طور مستقل از بازو جدا شود.
محققان دانشگاه پلیتکنیک فدرال لوزان (EPFL) در سوئیس، یک بازوی رباتیک اختراع کردهاند که میتواند با جداشدن بخش دست و خزیدن به سمت اشیای دور از دسترس، حیطه عملکردی خود را افزایش دهد.
این اختراع جالب توجه اخیراً در کنفرانس بین المللی رباتیک و اتوماسیون (ICRA) ارائه شد و توسط مجله IEEE Spectrum رسماً معرفی شده است.
به دلیل قدرت و سرعت، بازوهای رباتیک معمولاً برای پایداری بیشتر به کف زمین یا سایر سازهها متصل میشوند که تا حد زیادی دسترسی آنها را به اشیا محدود میکند. هدف از این اختراع جدید که در آزمایشگاه الگوریتمها و سیستمهای یادگیری (LASA) دانشگاه لوزان سوئیس حاصل شده، توسعه یک دست رباتیک دو وجهی با قابلیتهای گستردهتر برای گرفتن، ازجمله امکان جداسازی از بازوی رباتیک بوده است.
![این بازوی رباتیک با جداکردن دست خود میتواند به اشیای دورتر برسد [تماشا کنید]](../upload/attach/15143/robotarm2_1.gif)
دستهای رباتیک معمولاً با یک هدف طراحی میشوند: نگهداشتن اجسام. برای توسعه دستگاهی که بتواند این کار را انجام دهد و بهتنهایی بخزد، دانشمندان با استفاده از یک الگوریتم ژنتیک (که به ترفندهای بیولوژیک مانند انتخاب طبیعی و تکاملی متکی است) یک طرح پایه ایجاد و با شبیهساز فیزیک MuJoCo آن را اصلاح کردند.
![این بازوی رباتیک با جداکردن دست خود میتواند به اشیای دورتر برسد [تماشا کنید]](../upload/attach/15143/robotarm_1_2.gif)
الگوریتم و شبیهسازی به محققان کمک کرد تا موقعیت بهینه و تعداد انگشتهای مفصلی را در طرحی مشابه با دستهای انسان تعیین کنند. این دست رباتیک همچنین از یک اتصال مغناطیسی در مچ دست استفاده میکند که به آن اجازه میدهد بهطور مستقل به بازو متصل و یا از آن جدا شود.
انگشتان دست این ربات میتوانند در هر دو جهت خم شوند و به آن اجازه میدهد از برخی از آنها برای بلندکردن اجسام استفاده کند؛ درحالیکه بقیه به عنوان پاهای کوچک عمل میکنند. این طراحی همچنین قابلیت سودمندی دست را درحالیکه به بازو متصل است، افزایش میدهد. بنابراین میتواند چندین شیء را بهطور همزمان بدون چرخاندن بازو برای جابهجایی انگشتهای استفاده نشده، بلند کند.
![رباتهای انساننما با حرکات کونگفو در نمایش سال نوی چین خودنمایی کردند [تماشا کنید]](https://idat.ir/upload/attach/15148/a_photorealistic_humanoid_robot_performing_tr_1771331663_910x600_0.webp)

![شمشیر در دست یک ربات انساننما؛ ترکیب سنت و فناوری در نمایش مهارتهای رزمی [تماشا کنید]](https://idat.ir/upload/attach/15147/robot_lo7_910x600_0.webp)

پاسخ ها