
محققان موسسه فناوری ماساچوست(MIT) یک ربات با قابلیت گرفتن اجسام طراحی کردهاند که به زودی میتواند خانههای ما را تمیز کند.
به گزارش ایسنا و به نقل از آیای، واکنش به محرکهایی که در هوا پرواز میکنند تا به امروز منحصرا در اختیار موجودات زنده بوده است. در دنیایی که هیچ چیزی ثابت نیست، توانایی سازگاری ما با تغییرات محیطی دلیل بزرگی برای ادامه حیات ما به عنوان یک گونه است.
مهندسان موسسه فناوری ماساچوست در تلاش برای انتقال تواناییهای انسانی به رباتها، اکنون رباتی ساختهاند که اجسام را طی فرآیندی مشابه واکنش غیر ارادی انسان، میگیرد.
کنترل واکنشی سیستمی است که در آن از واکنشهای خودکار مانند رفلکس حرکتی زانو، برای تصمیمگیری استفاده میشود. این سیستمها رباتها را قادر میسازند تا به صورت واکنشی یک شی را بغلتانند یا آن را با کف دست یا انگشتان بگیرند تا بهتر بتوانند شی را نگه دارند.
اندرو سالوتوس(Andrew SaLoutos)، دانشجوی کارشناسی ارشد در بخش مهندسی مکانیک موسسه فناوری ماساچوست میگوید: در محیطهایی که مردم در آن زندگی و کار میکنند، همیشه عدم ثبات وجود دارد. یک فرد میتواند چیز جدیدی را روی میز بگذارد یا چیزی را در اتاق استراحت جابجا کند یا یک ظرف اضافی به سینک اضافه کند. ما امیدواریم رباتی با توانایی واکنش بتواند با این نوع عدم ثبات سازگار شود و کار کند.
بیشتر رباتهای مدرنی که قابلیت گرفتن اجسام را دارند به دادههای بصری، و از دوربینها، متکی هستند. این موارد ممکن است باعث تاخیر در زمان واکنش ربات شوند به خصوص زمانی که تلاش برای درک یک موقعیت با شکست مواجه میشود و ربات باید اطلاعات خود را از این دوربینها پیش از تلاش دوباره جمعآوری کند.
تیم کیم با استفاده از محرکهای سریع و واکنشدهنده پلتفرم جدیدی برای رباتی موسوم به یوزپلنگ کوچک ساختند. یوزپلنگ کوچک یک ربات چهارپای است که برای دویدن، جهیدن و سازگاری با سطوح مختلف طراحی شده است.
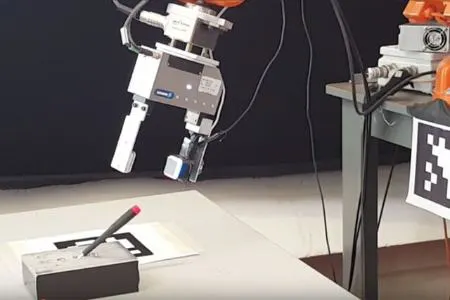
علاوه بر این پلتفرم، در این طراحی جدید از یک بازوی پرسرعت و دو انگشت سبک وزن و چند مفصلی تشکیل شده است. دوربینی که روی پایه بازو نصب شده و حسگرهای پهنای باند سفارشی در نوک انگشتان، نیرو و مکان هر تماسی را بلافاصله و نزدیکی اشیاء نزدیک به انگشت را بیش از ۲۰۰ بار در ثانیه ثبت میکنند.
این تیم الگوریتمی طراحی کردند که ربات را هدایت میکند تا به سرعت یک مانور گرفتن اجسام را در پاسخ به دادههای دریافت شده توسط نوک انگشتان، بدون دخالت یک برنامهریز سطح بالا، فعال کند.
کیم این فرآیند را به واگذاری وظایف به بخشهای سطح پایینتر در یک شرکت تشبیه میکند به جای آنکه مدیر عامل تمامی جزئیات را مدیریت کند.
در آزمایشهای انجامشده، مهندسان طرح جدید خود برای گرفتن اجسام را آزمایش کردند و در بیش از ۹۰ درصد موارد نیازی به تلاش مجدد نبود. این در حالی است که مساحت گرفتن موفق اجسام در مقایسه با کنترلکنندههای معمولی تا بیش از ۵۵ درصد افزایش یافت.





پاسخ ها