
موتور براشلس چیست
در این مقاله از ، موتور براشلس را مورد بحث قرار می دهیم. این نوع موتور با عدم وجود مکانیسم تماس مکانیکی و قطعهای مانند براش و کامیوتاتور، با ارتقاء کارایی، کاهش نیاز به نگهداری و عمر طولانی، در انواع کاربردها از صنعتی تا روباتیک مورد استفاده قرار میگیرد.
موتور یک جزء مهم در ابزارآلات برقی و شارژی است که انرژی الکتریکی را به انرژی مکانیکی تبدیل می کند. موتور براشلس یکی از انواع موتورها است که در حال حاضر در بسیاری از وسیله های الکتریکی مورد استفاده قرار می گیرد. موتور براشلس بدون استفاده از ذغال کار می کند و به همین دلیل از موتور های براش یا موتور های معمولی کارآمدتر است.
"موتور براشلس" یا "بدون ذغال" از جمله موتورهای با بهرهوری بالا است که در ساخت آنها از جاروبک استفاده نمیشود، بلکه از آهنربایی برای تبدیل انرژی الکتریکی به مکانیکی استفاده میکنند. این موتورها بیشترین گشتاور و سرعت را ارائه میدهند که باعث بیشترین راندمان کاری ممکن میشود. انواع مختلفی از این موتور وجود دارد که ساختمانی متفاوت نسبت به موتورهای براش دارند، به ویژه در سرعت عملیاتی. در این مقاله، به شناخت این نوع موتور، ویژگیهای آن، کاربردها، نحوه عملکرد، و جزئیات دیگری خواهیم پرداخت.

کاربردهای رایج موتورهای براشلس
موتورهای براشلس به دلیل کارایی، قابلیت اطمینان و کنترل دقیق در طیف وسیعی از کاربردها در صنایع مختلف مورد استفاده قرار می گیرند. در اینجا برخی از کاربردهای رایج موتورهای براشلس آورده شده است:
• وسایل نقلیه الکتریکی (EVs) و وسایل نقلیه الکتریکی هیبریدی (HEVs): موتورهای براشلس معمولاً در EV و HEV ها برای نیروی محرکه استفاده می شوند. آنها راندمان بالا، ترمز احیا کننده و کنترل دقیق سرعت و گشتاور را ارائه می دهند.
• پهپادها (وسایل نقلیه هوایی بدون سرنشین): موتورهای براشلس روتور پهپادها را نیرو می دهند و نیروی رانش و کنترل لازم را برای پرواز فراهم می کنند.
• اتوماسیون صنعتی: موتورهای براشلس در رباتیک، سیستم های نوار نقاله، ماشین های CNC و سایر تجهیزات خودکار برای ارائه حرکت دقیق و کنترل شده استفاده می شوند.
• فن های خنک کننده کامپیوتر: بسیاری از کامپیوترهای با کارایی بالا از موتورهای براشلس در فن های خنک کننده خود استفاده می کنند تا گرما را به طور موثر دفع کنند و دمای عملیاتی بهینه را حفظ کنند.
• لوازم الکترونیکی مصرفی: موتورهای براشلس در وسایل الکترونیکی مصرفی مختلف مانند ابزارهای برقی بی سیم، سشوارها، مخلوط کن ها و فن ها یافت می شوند و عملکردی کارآمد و قابل اعتماد را ارائه می دهند.
• دستگاه های پزشکی: موتورهای براشلس به دلیل عملکرد دقیق و بی صدا در وسایل پزشکی مانند ابزارهای جراحی، پمپ های تزریق و تجهیزات تشخیصی استفاده می شوند.
• هوافضا و هوانوردی: موتورهای براشلس را می توان در سیستم های هواپیما، از جمله محرک برای سطوح کنترلی و ارابه فرود و همچنین در سیستم های اویونیک و داخلی استفاده کرد.
• دوچرخه های برقی (E-Bikes): دوچرخه های الکترونیکی از موتورهای براشلس برای ارائه کمک پدال یا نیروی محرکه الکتریکی کامل استفاده می کنند که تجربه سواری را بهبود می بخشد و مسافت سفر را افزایش می دهد.
• کاربردهای خودرو: علاوه بر EV و HEV، موتورهای براشلس در سیستم های مختلف خودرو مانند شیشه برقی، برف پاک کن، فرمان برقی و تنظیم صندلی استفاده می شود.
• سیستم های HVAC: موتورهای براشلس در سیستم های گرمایش و تهویه مطبوع (HVAC) برای گردش کارآمد و کنترل شده هوا استفاده می شوند.
• سیستم های انرژی تجدیدپذیر: موتورهای براشلس در ژنراتورهای توربین بادی و سیستم های ردیابی خورشیدی برای بهینه سازی جذب و تبدیل انرژی استفاده می شوند.
• کاربردهای دریایی: موتورهای براشلس را می توان در سیستم های نیروی محرکه دریایی، قایق های برقی و وسایل نقلیه زیر آب یافت.
• پمپها و کمپرسورهای صنعتی: موتورهای براشلس پمپها و کمپرسورها را در محیطهای صنعتی به حرکت در میآورند و انتقال و فشار سیال کارآمد را فراهم میکنند.
• ماشین آلات نساجی: موتورهای براشلس در ماشین آلات نساجی برای کنترل دقیق در فرآیندهایی مانند بافندگی، ریسندگی و رنگرزی استفاده می شوند.
• وسایل نقلیه بازی و RC: موتورهای براشلس ماشینهای کنترلشده از راه دور، قایقها، هواپیماها و سایر وسایل نقلیه تفریحی را نیرو میدهند و کنترلی با عملکرد بالا و پاسخگو ارائه میکنند.
• کاربردهای نظامی و دفاعی: موتورهای براشلس در تجهیزات نظامی و دفاعی از جمله هواپیماهای بدون سرنشین، رباتیک و سیستم های خودرو استفاده می شوند.
• ماشین آلات چاپ و بسته بندی: موتورهای براشلس در ماشین های چاپ، ماشین های برچسب زنی و تجهیزات بسته بندی برای حرکت دقیق و ثابت استفاده می شوند.
اینها تنها چند نمونه از کاربردهای زیاد موتورهای براشلس هستند. تطبیق پذیری، کارایی و قابلیت های کنترل دقیق آنها را به یک جزء حیاتی در فناوری مدرن در صنایع متعدد تبدیل می کند.

خصوصیات موتور براشلس
ویژگی های موتورهای براشلس
ویژگی های کلیدی موتورهای براشلس عبارتند از:
• طراحی بدون جاروبک: در موتور براشلس، فرآیند کموتاسیون به صورت الکترونیکی از طریق سنسورها و یک کنترل کننده موتور کنترل می شود. این امر سایش و پارگی ناشی از برس ها را در موتورهای برس خورده از بین می برد و منجر به طول عمر بیشتر و کاهش تعمیر و نگهداری می شود.
• راندمان بالاتر: موتورهای براشلس عموماً به دلیل کاهش اصطکاک و تولید حرارت کمتر، راندمان بالاتری دارند. این می تواند منجر به بهبود مصرف انرژی و عمر باتری بیشتر در برنامه هایی مانند وسایل نقلیه الکتریکی و هواپیماهای بدون سرنشین شود.
• عملکرد صاف: عدم وجود برس و کموتاتور منجر به عملکرد نرم تر و دقیق تر می شود. این امر به ویژه در کاربردهایی که به کنترل دقیق سرعت و لرزش کم نیاز دارند، مانند روباتیک و ماشینکاری دقیق، مهم است.
• تداخل الکترومغناطیسی کاهش یافته (EMI): موتورهای برس خورده می توانند تداخل الکترومغناطیسی را به دلیل قوس شدن برس ها روی کموتاتور ایجاد کنند. موتورهای براشلس EMI کمتری تولید میکنند و برای کاربردهایی که EMI یک نگرانی است، مانند تجهیزات پزشکی و دستگاههای رادیویی، مناسب هستند.
• فشرده و سبک: موتورهای براشلس را می توان به گونه ای طراحی کرد که در مقایسه با موتورهای برس دار با توان خروجی مشابه، فشرده تر و سبک تر باشند. این باعث میشود که برای کاربردهایی که محدودیتهای فضا و وزن مهم هستند، مناسب باشند.
• ترمز احیاکننده: برخی از پیکربندیهای موتور بدون جاروبک امکان ترمز احیاکننده را فراهم میکنند، که در آن انرژی تولید شده در طول ترمز به منبع قدرت بازگردانده میشود و بازده انرژی کلی را بهبود میبخشد.

موتورهای براشلس انواع مختلفی دارد
انواع مختلفی از موتورهای براشلس وجود دارد که هر کدام برای کاربردها و الزامات عملکردی خاص طراحی شده اند. در اینجا چند نوع متداول موتورهای براشلس آورده شده است:
• موتورهای Outrunner Brushless: موتورهای Outrunner که به عنوان موتورهای روتور خارجی نیز شناخته می شوند، دارای روتور (قسمت دوار) خارج از استاتور (قسمت ثابت) هستند. این موتورها معمولاً قطر بیشتری دارند و در سرعت های کمتر گشتاور بیشتری تولید می کنند. Outrunners معمولاً در برنامههایی مانند هواپیماهای RC استفاده میشوند، جایی که گشتاور بالا و خنکسازی کارآمد مهم هستند.
• موتورهای Inrunner Brushless: موتورهای Inrunner دارای روتور خود در داخل استاتور هستند. این موتورها اغلب فشرده تر هستند و برای کاربردهایی که به سرعت بالاتری نیاز دارند مناسب هستند. آنها معمولاً در اتومبیلهای RC، قایقها و برنامههای روباتیک کوچکتر یافت میشوند.
• موتورهای DC براشلس (BLDC): موتورهای BLDC برای کاربردهایی طراحی شده اند که نیاز به راندمان بالا و کنترل دقیق سرعت و گشتاور دارند. آنها از کموتاسیون الکترونیکی استفاده می کنند و به طور معمول دارای سه فاز سیم پیچ هستند. موتورهای BLDC در طیف وسیعی از کاربردها از جمله اتوماسیون صنعتی، وسایل نقلیه الکتریکی، فن های خنک کننده کامپیوتر و لوازم خانگی استفاده می شوند.
• موتورهای رلوکتانس سنکرون: این موتورها از ترکیب آهنرباهای دائمی و گشتاور رلوکتانسی برای دستیابی به راندمان و عملکرد بالا استفاده می کنند. آنها برای کاربردهایی که نیاز به گشتاور بالا در سرعت های پایین دارند، مانند ماشین آلات صنعتی مناسب هستند.
• موتورهای سنکرون مغناطیس دائمی (PMSM): موتورهای PMSM از آهنرباهای دائمی در روتور استفاده می کنند که با میدان مغناطیسی دوار استاتور هماهنگ می شوند. آنها راندمان بالا و کنترل دقیق را ارائه می دهند و آنها را برای کاربردهایی مانند روباتیک، ماشین آلات صنعتی و وسایل نقلیه الکتریکی مناسب می کند.
• موتورهای براشلس بدون سنسور: در برخی کاربردها، از موتورهای براشلس بدون سنسور برای کاهش پیچیدگی و هزینه استفاده می شود. این موتورها از الگوریتم ها و حسگر back-emf (نیروی محرکه الکتریکی) برای تعیین موقعیت روتور بدون نیاز به سنسورهای خارجی استفاده می کنند. آنها معمولاً در لوازم الکترونیکی مصرفی و کاربردهای خاص خودرو استفاده می شوند.
• موتورهای براشلس شار محوری: موتورهای شار محوری طراحی منحصر به فردی دارند که در آن شار مغناطیسی موازی با محور چرخش جریان می یابد. آنها می توانند در مقایسه با موتورهای شار شعاعی سنتی فشرده تر و کارآمدتر باشند و برای کاربردهایی با محدودیت فضا مناسب باشند.
• موتورهای بدون برس هسته توخالی: این موتورها دارای یک مرکز توخالی هستند که امکان طراحی مختلف مانند عبور سیم یا سایر اجزا از محور موتور را فراهم می کند. آنها در برنامه هایی استفاده می شوند که یکپارچه سازی و صرفه جویی در فضا ضروری است.
• موتورهای براشلس خطی: موتورهای براشلس خطی برای ایجاد حرکت خطی به جای حرکت چرخشی طراحی شده اند. آنها در صنایعی مانند تولید، تجهیزات پزشکی و اتوماسیون کاربرد دارند.
• موتورهای براشلس لوله ای: موتورهای لوله ای شکل استوانه ای دارند و می توانند در کاربردهایی مانند سیستم های نوار نقاله، رباتیک و تجهیزات خودکار استفاده شوند.
اینها تنها چند نمونه از انواع مختلف موتورهای براشلس موجود هستند. انتخاب نوع موتور به عواملی مانند الزامات کاربردی، نیازهای بازده، سرعت، گشتاور، محدودیتهای اندازه و ملاحظات هزینه بستگی دارد.
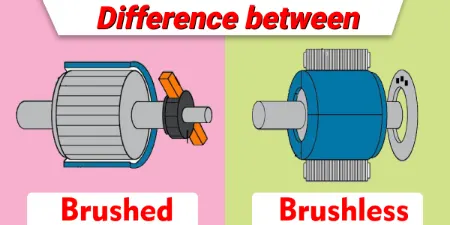
فرق بین موتورهای براشلس و موتورهای برس دار
موتورهای براشلس و موتورهای برس دار دو نوع مختلف موتور الکتریکی هستند که هر کدام دارای مجموعه ای از ویژگی ها و اصول عملکرد خاص خود هستند. در اینجا تفاوت های اصلی بین موتورهای براشلس و موتورهای برس دار وجود دارد:
• موتورهای براشلس: موتور براشلس از کموتاسیون الکترونیکی استفاده می کنند که در آن تغییر جریان در سیم پیچ موتور توسط یک کنترل کننده یا درایور خارجی کنترل می شود. این امر نیاز به برس و کموتاتور را از بین می برد و در نتیجه اصطکاک و سایش کاهش می یابد.
• موتورهای برس دار: موتورهای برس دار از کموتاسیون مکانیکی استفاده می کنند که در آن جهت جریان در سیم پیچ ها با استفاده از برس ها و یک کموتاتور تغییر می کند. تماس فیزیکی بین برس ها و کموتاتور می تواند باعث اصطکاک، سایش و قوس شود که در طول زمان منجر به مشکلات نگهداری و کارایی می شود.
• موتورهای براشلس: موتورهای براشلس معمولاً به دلیل عدم وجود برس و اصطکاک و سایش مرتبط، کارآمدتر هستند. این راندمان بالاتر منجر به استفاده بهتر از انرژی و تولید گرمای کمتر می شود.
• موتورهای برس دار: موتورهای برس خورده به دلیل تلفات انرژی ناشی از اصطکاک، سایش برس و قوس در کموتاتور، کارایی کمتری دارند.
• موتورهای براشلس: موتورهای براشلس نیاز به تعمیر و نگهداری کمتری دارند زیرا فاقد برس و کموتاتور هستند که به مرور زمان فرسوده می شوند. این منجر به طول عمر عملیاتی بیشتر و کاهش هزینه های تعمیر و نگهداری می شود.
• موتورهای برس دار: موتورهای برس دار به دلیل فرسودگی و تعویض برس ها و کموتاتورها نیاز به تعمیر و نگهداری مکرر دارند که می تواند هزینه های عملیاتی را افزایش دهد.
• موتورهای براشلس: موتورهای براشلس معمولاً به دلیل کاهش سایش و کمتر شدن قطعات متحرک در معرض تخریب، طول عمر بیشتری دارند.
• موتورهای برس دار: وجود برس ها و اجزای مکانیکی در معرض سایش می تواند منجر به طول عمر عملیاتی کمتری شود.
• موتورهای بدون جاروبک: موتورهای براشلس برای دستیابی به کموتاسیون و کنترل مناسب، به تجهیزات الکترونیکی و سنسورهای کنترل پیچیده تری نیاز دارند. این پیچیدگی امکان کنترل دقیق سرعت و گشتاور را فراهم می کند.
• موتورهای برس دار: موتورهای برس دار الزامات کنترلی ساده تری دارند زیرا کموتاسیون مکانیکی است. با این حال، این سادگی ممکن است دقت کنترل را محدود کند.
• موتورهای براشلس: موتورهای براشلس میتوانند به سرعتهای بالاتری دست یابند و نسبت گشتاور به وزن بهتری را ارائه دهند و برای کاربردهایی که به سرعت و چگالی توان بالا نیاز دارند، مناسب هستند.
• موتورهای برس دار: موتورهای برس دار اغلب محدودیت هایی در حداکثر سرعت دارند و ممکن است خروجی گشتاور کمتری در مقایسه با موتورهای براشلس داشته باشند.
• موتورهای براشلس: موتورهای براشلس تداخل الکترومغناطیسی (EMI) کمتری نسبت به موتورهای برس دار به دلیل عدم وجود برس های قوس دار روی یک کموتاتور ایجاد می کنند.
• موتورهای برس دار : موتورهای برس دار می توانند به دلیل ایجاد قوس و جرقه ای که در رابط برس-کموتاتور ایجاد می شود، EMI ایجاد کنند.
• موتورهای براشلس: موتورهای براشلس می توانند برای یک توان خروجی معین فشرده تر و سبک تر باشند و برای کاربردهایی با محدودیت فضا و وزن مناسب باشند.
• موتورهای برس دار: موتورهای برس دار ممکن است برای خروجی های برق مشابه بزرگتر و سنگین تر باشند زیرا به برس و کموتاتور نیاز دارند.
به طور خلاصه، موتورهای براشلس مزایایی از نظر کارایی، نگهداری، طول عمر و دقت کنترل دارند، در حالی که موتورهای برس دار الزامات کنترلی ساده تری دارند و ممکن است برای کاربردهای کم تقاضا مناسب باشند. انتخاب بین این دو نوع به نیازهای خاص برنامه مانند قدرت، کارایی، اندازه و دقت کنترل بستگی دارد.

مزایای موتورهای براشلس
موتورهای براشلس طیف وسیعی از مزایا و معایب را در مقایسه با انواع دیگر موتورها مانند موتورهای برس دار دارند. در اینجا برخی از مزایا و معایب کلیدی موتورهای براشلس آورده شده است:
• راندمان بالاتر: موتورهای براشلس معمولاً به دلیل عدم وجود برس و کموتاتور کارآمدتر هستند که منجر به اتلاف انرژی کمتر به عنوان گرما و بهبود مصرف انرژی کلی می شود.
• تعمیر و نگهداری کمتر: موتورهای براشلس نیاز به تعمیر و نگهداری کمتری دارند زیرا فاقد برس و کموتاتور هستند که در طول زمان فرسوده می شوند. این منجر به طول عمر عملیاتی بیشتر و کاهش هزینه های تعمیر و نگهداری می شود.
• طول عمر بیشتر: عدم وجود برس ها و اجزای مکانیکی در معرض سایش و قوس شدن منجر به طول عمر عملیاتی بیشتر می شود.
• عملکرد صاف: موتورهای براشلس به دلیل عدم وجود برس های مکانیکی و کموتاسیون، عملکرد نرم و دقیق تری را ارائه می دهند و آنها را برای کاربردهایی که نیاز به کنترل دقیق سرعت و حداقل لرزش دارند، مناسب می کند.
• کنترل دقیق: موتورهای براشلس کنترل دقیق و دینامیکی سرعت و گشتاور را از طریق کموتاسیون الکترونیکی ارائه میدهند و امکان کنترل بهتر بر عملکرد موتور را فراهم میکنند.
• نسبت گشتاور به اینرسی بالا: موتورهای براشلس می توانند گشتاور خروجی بالایی نسبت به اینرسی خود ارائه دهند که امکان شتاب و کاهش سرعت را فراهم می کند.
• ترمز احیاکننده: برخی از پیکربندیهای موتورهای براشلس از ترمز احیاکننده پشتیبانی میکنند، که در آن انرژی تولید شده در طول ترمز به منبع قدرت برگشت داده میشود و راندمان کلی را افزایش میدهد.
• طراحی فشرده: موتورهای براشلس را می توان به شکل فشرده طراحی کرد که آنها را برای کاربردهایی با فضای محدود مناسب می کند.
• تداخل الکترومغناطیسی کاهش یافته (EMI): موتورهای براشلس تداخل الکترومغناطیسی کمتری (EMI) در مقایسه با موتورهای برس دار ایجاد می کنند، که آنها را برای کاربردهایی مناسب می کند که EMI می تواند با الکترونیک حساس یا سیستم های ارتباطی تداخل ایجاد کند.
• محدوده سرعت گسترده: موتورهای براشلس می توانند به طور موثر در طیف وسیعی از سرعت ها، از دورهای بسیار کم تا بسیار زیاد، کار کنند و آنها را برای کاربردهای مختلف همه کاره می کند.
• هزینه اولیه بالاتر: ساخت موتورهای براشلس می تواند گران تر باشد و به الکترونیک کنترل تخصصی نیاز دارد که می تواند منجر به هزینه های اولیه بالاتر در مقایسه با موتورهای برس دار شود.
• الکترونیک کنترل پیچیده: موتورهای براشلس برای دستیابی به جابجایی و کنترل مناسب نیاز به الکترونیک و سنسورهای کنترل پیچیده تری دارند که به پیچیدگی سیستم می افزاید.
• پیچیدگی کنترل: سیستم کنترل پیچیده موتورهای براشلس ممکن است به تخصص بیشتری برای راه اندازی و عیب یابی نیاز داشته باشد که به طور بالقوه هزینه های نگهداری و تعمیر را افزایش می دهد.
• نویز الکترونیکی: در حالی که موتورهای براشلس نویز مکانیکی کمتری تولید میکنند، میتوانند نویز الکترونیکی (تداخل الکترومغناطیسی) ایجاد کنند که اگر به درستی محافظت نشود، ممکن است با الکترونیک حساس تداخل ایجاد کند.
• گشتاور محدود با سرعت کم: برخی از طراحیهای موتورهای براشلس ممکن است در مقایسه با موتورهای برس دار، گشتاور کمتری در سرعتهای بسیار پایین از خود نشان دهند، که میتواند محدودیتی برای کاربردهای خاص باشد.
• چالشهای یکپارچهسازی: ادغام موتورهای براشلس در سیستمهای خاص ممکن است نیاز به بررسی دقیق عواملی مانند اتلاف گرما، نصب و تراز سنسور داشته باشد.
• کمتر متداول در کاربردهای کم هزینه: موتورهای براشلس به دلیل هزینه و پیچیدگی آنها اغلب در کاربردهای پیشرفته یا تخصصی استفاده می شوند که ممکن است در دسترس بودن آنها را در برخی از محصولات مصرفی کم هزینه محدود کند.
در نتیجه، در حالی که موتورهای براشلس مزایای قابل توجهی از نظر کارایی، تعمیر و نگهداری، طول عمر و کنترل دقیق دارند، پیچیدگی ها و هزینه های خاصی نیز دارند که باید هنگام انتخاب موتور برای یک کاربرد خاص به دقت در نظر گرفته شوند. انتخاب بین انواع موتورهای براشلس و سایر انواع موتور بستگی به الزامات و محدودیت های خاص برنامه دارد.
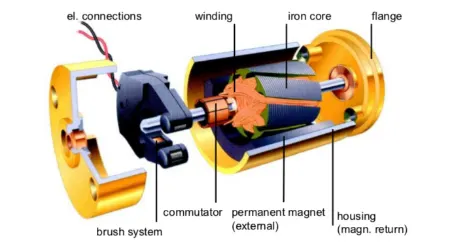
اجزای موتور براشلس
ساخت یک موتور براشلس شامل چندین مرحله و اجزای کلیدی برای ایجاد یک موتور کاربردی و کارآمد است. در اینجا یک نمای کلی از روند ارائه شده است:
با ساختن استاتور، که بخش ثابت موتور است، شروع کنید. استاتور معمولاً از پشته ای از ورق های فولادی چند لایه برای کاهش تلفات جریان گردابی تشکیل شده است.
استاتور را با سیم پیچ هایی بپیچید تا سیم پیچ های الکترومغناطیسی موتور ایجاد شود. این سیم پیچ ها میدان مغناطیسی لازم برای کار موتور را تولید می کنند.
روتور، قسمت دوار موتور را بسازید. روتور می تواند دارای آهنرباهای دائمی باشد که با میدان مغناطیسی استاتور برای ایجاد حرکت در تعامل هستند. تعداد قطب های روتور و استاتور مشخصه های سرعت و گشتاور موتور را تعیین می کند.
یک محفظه برای محصور کردن استاتور و روتور ایجاد کنید. این محفظه از اجزای داخلی موتور محافظت و پشتیبانی می کند. یاتاقان ها را برای پشتیبانی از چرخش روتور در داخل محفظه نصب کنید. بلبرینگ های باکیفیت برای عملکرد روان و حداقل اصطکاک مهم هستند.
یک کنترل کننده موتور مناسب را طراحی یا انتخاب کنید که جریان و ولتاژ لازم را به سیم پیچ های موتور بدهد. کنترل کننده موتور سرعت و جهت موتور را تعیین می کند.
سایر وسایل الکترونیکی مانند مدارهای حسگر اثر هال (در صورت استفاده) و هر گونه ویژگی ایمنی مورد نیاز را با هم ادغام کنید.
سیم پیچ های موتور را طبق نمودار سیم کشی مناسب به کنترل کننده موتور وصل کنید.
از عایق بندی مناسب و اتصالات مطمئن برای جلوگیری از شورت یا سایر مشکلات الکتریکی اطمینان حاصل کنید.
قبل از مونتاژ نهایی، قطعات الکتریکی و مکانیکی موتور را به طور کامل آزمایش کنید. اتصالات فاز مناسب، عملکرد سنسور (در صورت استفاده) و سایر پارامترها را بررسی کنید.
برای اطمینان از کنترل دقیق سرعت و گشتاور، کنترل کننده موتور را کالیبره کنید.
اجزای موتور را درون محفظه مونتاژ کنید و از تراز مناسب استاتور و روتور اطمینان حاصل کنید.
محفظه و قطعات را محکم کنید و مطمئن شوید که موتور متعادل است تا لرزش ها به حداقل برسد.
برای اطمینان از اینکه عملکرد موتور با مشخصات طراحی مطابقت دارد، آزمایش و کنترل کیفیت اضافی را انجام دهید. پارامترهای کنترل موتور را برای بهینه سازی راندمان، گشتاور و سرعت تنظیم کنید.
موتور براشلس را در برنامه مورد نظر، خواه پهپاد، وسیله نقلیه الکتریکی، ماشین آلات صنعتی یا سایر سیستم ها، ادغام کنید.
پیاده سازی الگوریتم های کنترلی و رابط های لازم برای تعامل بدون درز با سیستم کلی.
ساخت موتور براشلس نیازمند طراحی دقیق، ساخت دقیق و آزمایش کامل برای دستیابی به عملکرد و قابلیت اطمینان مطلوب است. مراحل و جزئیات خاص ممکن است بر اساس کاربرد مورد نظر موتور و پیچیدگی طراحی متفاوت باشد.

موتور براشلس موتور الکتریکی است
1. موتور براشلس چیست؟
موتور براشلس موتور الکتریکی است که بدون برس و کموتاتور کار می کند. از کموتاسیون الکترونیکی برای کنترل جریان جریان در سیمپیچهای موتور استفاده میکند که نتیجه آن راندمان بالاتر، کاهش تعمیر و نگهداری و عملکرد نرمتر در مقایسه با موتورهای برسکشی شده است.
2. موتور براشلس چگونه کار می کند؟
یک موتور براشلس از آهنرباهای دائمی روی روتور و سیمپیچهای استاتور با کنترل الکترونیکی برای ایجاد حرکت چرخشی استفاده میکند. حسگرها موقعیت روتور را تشخیص میدهند و به کنترلکننده موتور اجازه میدهند تا جریان را در سیمپیچها تغییر دهد و یک میدان مغناطیسی دوار ایجاد کند که روتور را به حرکت در میآورد.
3. مزایای موتورهای براشلس چیست؟
موتورهای براشلس راندمان بالاتر، طول عمر بیشتر، کاهش تعمیر و نگهداری، عملکرد روان تر، کنترل دقیق و نسبت گشتاور به وزن بهتر را در مقایسه با موتورهای برس دار ارائه می دهند. آنها معمولاً در برنامه هایی که نیاز به عملکرد و قابلیت اطمینان بالا دارند استفاده می شوند.
4. موتورهای براشلس چه کاربردهایی دارند؟
موتورهای براشلس در وسایل نقلیه الکتریکی، هواپیماهای بدون سرنشین، روباتیک، اتوماسیون صنعتی، لوازم الکترونیکی مصرفی، تجهیزات پزشکی، هوافضا، سیستمهای انرژی تجدیدپذیر و غیره استفاده میشوند.
5. آیا موتورهای براشلس کارآمدتر از موتورهای برس دار هستند؟
بله، موتورهای براشلس به دلیل عدم وجود برس و کموتاتور، کارایی بیشتری دارند که باعث کاهش اصطکاک و اتلاف انرژی می شود.
6. آیا موتورهای براشلس نیاز به تعمیر و نگهداری دارند؟
موتورهای براشلس در مقایسه با موتورهای برس دار به نگهداری کمتری نیاز دارند زیرا فاقد برس و کموتاتورهای فرسوده هستند. این منجر به طول عمر عملیاتی بیشتر و کاهش هزینه های تعمیر و نگهداری می شود.
7. آیا می توانم سرعت موتور براشلس را کنترل کنم؟
بله، موتورهای براشلس را میتوان با استفاده از کموتاسیون الکترونیکی و کنترلکنندههای موتور دقیقاً از نظر سرعت و گشتاور کنترل کرد.
8. عملکرد بدون سنسور در موتورهای براشلس چیست؟
عملکرد بدون سنسور به راه اندازی یک موتور براشلس بدون سنسور خارجی برای تشخیص موقعیت روتور اشاره دارد. در عوض، حسگر و الگوریتمهای back-emf (نیروی محرکه الکتریکی) برای تعیین موقعیت روتور برای کموتاسیون استفاده میشوند.
9. آیا انواع مختلفی از موتورهای براشلس وجود دارد؟
بله، انواع مختلفی از موتورهای براشلس وجود دارد، از جمله طرحهای outrunner و inrunner، موتورهای رلوکتانس سنکرون، موتورهای سنکرون مغناطیس دائم (PMSM) و موتورهای شار محوری، که هر کدام برای کاربردها و الزامات عملکردی خاص طراحی شدهاند.
در نتیجه، موتورهای براشلس با کارایی، قابلیت اطمینان و کنترل دقیق، دنیای پیشرانه الکتریکی و اتوماسیون را متحول کرده اند. با حذف برسها و کموتاتورهای سنتی موجود در موتورهای براش، فناوری براشلس عصر جدیدی از نوآوری را در طیف گستردهای از صنایع آغاز کرده است.
عدم وجود اصطکاک و سایش مکانیکی در موتورهای براشلس به بازده انرژی بالاتر، کاهش نیاز به تعمیر و نگهداری و افزایش طول عمر عملیاتی منجر میشود. این به نوبه خود به پیشرفت های قابل توجهی در وسایل نقلیه الکتریکی، هواپیماهای بدون سرنشین، روباتیک، ماشین آلات صنعتی و فراتر از آن کمک می کند.
همانطور که تکنولوژی به تکامل خود ادامه می دهد، موتورهای براشلس در خط مقدم پیشرفت رانندگی باقی می مانند و حمل و نقل تمیزتر، اتوماسیون پیشرفته و مصرف انرژی کارآمدتر را ممکن می سازند. با تحقیق و توسعه مداوم، تنها میتوان انتظار داشت که شاهد اصلاح و تنوع بیشتر کاربردهای موتور بدون جاروبک باشیم و جایگاه آنها را به عنوان سنگ بنای مهندسی مدرن مستحکم کند.
گردآوری:بخش دنیای کسب و کار




پاسخ ها